
 产品:8
产品:8
 联系我们
联系我们

机器人地面轨道轴承机械手移动小车在直线方向上的移动和定位可通过操作面板和显示屏直接编辑。理论上,在直线轴的有效行程范围内可以设置无数的定位点。位置精度由编码器检测,并由伺服系统控制电机保证,重复定位精度在±0.05mm范围内。
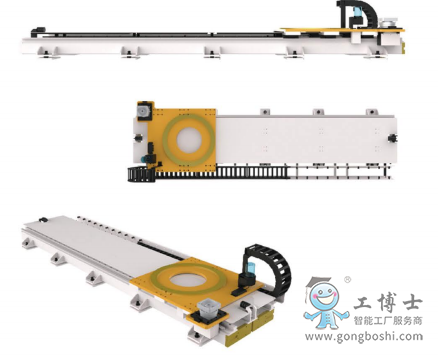
机器人第七轴系统与“机器人”和“机床”系统之间的信号接口均采用数字信号传输,以确保彼此的稳定性和可靠性。有手动和自动两种操作控制模式;在手动模式下,一个站可以独立操作某个工位;在自动模式下,将根据设定的运行程序自动运行。移动速度应根据运行要求在0~30m/min范围内任意设定。